OpenCV-Python实现轮廓拟合代码实例
本篇文章小编给大家分享一下OpenCV-Python实现轮廓拟合代码实例,文章代码介绍的很详细,小编觉得挺不错的,现在分享给大家供大家参考,有需要的小伙伴们可以来看看。
前言
什么是轮廓?
轮廓可以简单认为成将连续的点(连着边界)连在一起的曲线,具有相同 的颜色或者灰度。轮廓在形状分析和物体的检测和识别中很有用。
为了更加准确,要使用二值化图像。在寻找轮廓之前,要进行阈值化处理 或者 Canny 边界检测。
查找轮廓的函数会修改原始图像。如果你在找到轮廓之后还想使用原始图 像的话,你应该将原始图像存储到其他变量中。
在 OpenCV 中,查找轮廓就像在黑色背景中超白色物体。你应该记住, 要找的物体应该是白色而背景应该是黑色。
在计算轮廓时,可能并不需要实际的轮廓,而仅需要一个接近于轮廓的近似多边形。比如矩形其实都是差不多的轮廓,都是长宽不相等且平行的四边形,那么只要提供一个近似的轮廓,我们就可以区分形状。
在OpenCV中,它给我们提供了cv2.boundingRect()函数来绘制轮廓的,其完整定义如下:
def boundingRect(array):
array:前面已经介绍过,array是一个灰度图像,或者轮廓。
该函数返回3个值时,是的左上角顶点的坐标值以及的宽与高。返回4个值时,是矩形左上角顶点的x坐标,y坐标,以及宽高。
绘制的
现在,我们还是使用前面的一张图形,如下图所示:
得到图形之后,我们使用上面的函数,计算该图像轮廓的4值,代码如下:
import cv2
img = cv2.imread("26_1.jpg")
# 转换为灰度图像
gray = cv2.cvtColor(img1, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
x, y, w, h = cv2.boundingRect(contours[0])
print(x, y, w, h)
运行之后,控制台输出如下内容:

这里我们得到了的矩形左上角坐标为(53,120),其宽高分别为272与84。
既然我们已经得到了其的坐标以及宽高,那么我们可以开始绘制其。前面提取轮廓绘制用的是cv2.drawContours()函数,这里同样也是。
代码如下:
import cv2
import numpy as np
img = cv2.imread("26_1.jpg")
cv2.imshow("img1",img)
# 转换为灰度图像
gray= cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
x, y, w, h = cv2.boundingRect(contours[0])
rect=np.array([[[x,y],[x+w,y],[x+w,y+h],[x,y+h]]])#1
cv2.drawContours(img,[rect],-1,(255,255,255),2)#1
cv2.imshow("img2",img)
cv2.waitKey()
cv2.destroyAllWindows()
运行之后,其的就被我们标记出来了,效果如下:
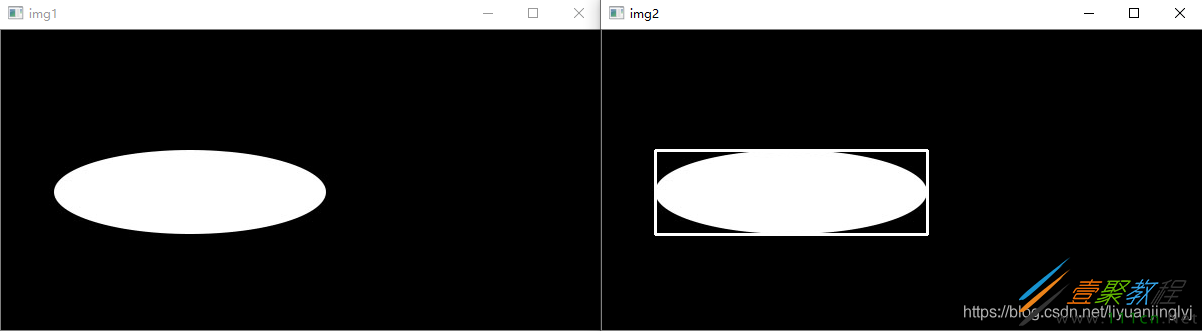
当然,这里我们还可以使用另一个函数cv2.rectangle()来绘制,值需要更换上面代码中注释1的两个代码,具体如下所示:
cv2.rectangle(img, (x, y), (x + w, y + h), (255, 255,255),2)
最小包围矩形框
在OpenCV中,它还提供了cv2.minAreaRect()来绘制最小包围矩形框,其完整定义如下:
def minAreaRect(points):
其中points参数是轮廓,返回值为矩形特征信息,包括矩形的中心(x,y),宽高,以及旋转角度。
特别注意,minAreaRect函数的返回值并不能直接代入drawContours()函数中。因此,我们必须将其转换为符合要求的结构才能接着操作。通过cv2.boxPoint()函数就可以转换为符合drawContours()的结构参数。
还是上面那张图,不过我们用旋转后的原图,代码如下:
import cv2
import numpy as np
img = cv2.imread("26_4.jpg")
cv2.imshow("img1",img)
# 转换为灰度图像
gray= cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
rect= cv2.minAreaRect(contours[0])
print(rect)
points=cv2.boxPoints(rect)
print(points)
points=np.int0(points)
print(points)
cv2.drawContours(img,[points],0,(255,255,255),2)
cv2.imshow("img2",img)
cv2.waitKey()
cv2.destroyAllWindows()
运行之后,图像效果以及控制台的输出信息如下:

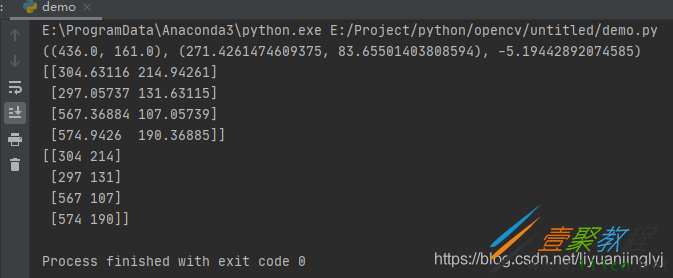
这里我们可以清楚的看到minAreaRect()函数返回。先通过boxPoints()函数转换为drawContours()函数能接受的参数格式,然后通过取整转换为具体的像素坐标值。
最小包围圆形框
既然有最小包围矩形框,那么一定就有最小包围圆形框。在OpenCV中,它给我们提供cv2.minEnclosingCircle()函数来绘制最小包围圆形框。
函数的完整定义如下:
def minEnclosingCircle(points):
这里的参数与上面的points参数一致,但是其返回值并不相同,毕竟绘制圆形肯定与绘制矩形的参数肯定不一样。
它有两个返回值,一个是圆形的中心坐标(x,y),一个是圆形的半径r。下面,我们直接来绘制上面的最小包围圆形框。具体代码如下所示:
import cv2
import numpy as np
img = cv2.imread("26_4.jpg")
cv2.imshow("img1", img)
# 转换为灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
(x, y), r = cv2.minEnclosingCircle(contours[0])
center = (int(x), int(y))
r = int(r)
cv2.circle(img, center, r, (255, 255, 255), 2)
cv2.imshow("img2", img)
cv2.waitKey()
cv2.destroyAllWindows()
运行之后,效果如下所示:

最优拟合
在OpenCV中,它给我们提供了cv2.fitEllipse()函数绘制最优拟合。其完整的定义如下:
def fitEllipse(points):
其中points参数与前文一致,而它的返回值是RotatedRect类型,这是因为该函数返回的是拟合的外接矩形,包括矩形的质心,宽高,旋转角度等信息,这些信息正好与的中心点,轴长度,旋转角度一致。
下面,我们来使用该函数绘制最优拟合,这里我们选取如上图所示的一张矩形图。具体代码如下:
import cv2
img = cv2.imread("27.jpg")
cv2.imshow("img1", img)
# 转换为灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
ellipse = cv2.fitEllipse(contours[0])
cv2.ellipse(img, ellipse, (0, 0, 255), 3)
cv2.imshow("img2", img)
cv2.waitKey()
cv2.destroyAllWindows()
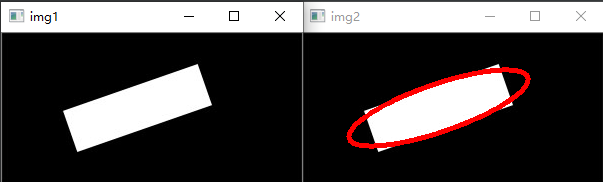
运行之后,效果如下所示:
最优拟合直线
在OpenCV中,它还提供了cv2.fitLine()函数绘制最优拟合直线,其完整定义如下:
def fitEllipse(points):
points:与前文一样,是轮廓
distType:距离类型。拟合直线时,要使输入点到拟合直线的距离之和最小。详细参数定义参考开发文档,这里不在赘述。
param:距离参数,与所选距离类型有关。当该参数为0时,自动选择最优值。
reps:用于表示拟合直线所需要的径向精度,通常该值被设定为0.01
aeps:用于表示拟合直线所需要的角度精度,通常该值被设定为0.01
对于二维直线,返回值line为4维,前两维代表拟合出的直线的方向,后两位代表直线上的一点。
下面,我们来直接使用代码绘制最优拟合直线。
import cv2
img = cv2.imread("27.jpg")
cv2.imshow("img1", img)
# 转换为灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
ellipse = cv2.fitEllipse(contours[0])
cv2.ellipse(img, ellipse, (0, 0, 255), 3)
cv2.imshow("img2", img)
cv2.waitKey()
cv2.destroyAllWindows()
运行之后,效果如下所示:
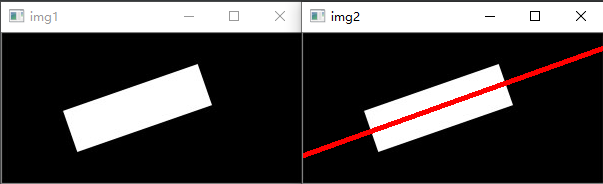
对于绘制直线来说,我们需要获取绘制直线的起点以及终点,这里lefty为起点,righty为终点。
最小外包
在OpenCV,它还提供了cv2.minEnclosingTriangle()函数来绘制最小外包。其完整定义如下:
def minEnclosingTriangle(points, triangle=None):
其中points与前文类似,其返回值triangle为外包的三个顶点集。
下面,我们直接构建最小外包,具体代码如下:
import cv2
img = cv2.imread("27.jpg")
cv2.imshow("img1", img)
# 转换为灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
area, trg1 = cv2.minEnclosingTriangle(contours[0])
print(area)
print(trg1)
for i in range(0, 3):
cv2.line(img, tuple(trg1[i][0]), tuple(trg1[(i + 1) % 3][0]), (0, 255, 0), 2)
cv2.imshow("img2", img)
cv2.waitKey()
cv2.destroyAllWindows()
运行之后,效果如下:

需要注意的是,在cv2中没有直接绘制的函数,所以我们通过绘制三条直线,绘制,minEnclosingTriangle()函数第一个返回值为面积,第二返回值是三点坐标。
在OpenCV中,它还提供了cv2.approxPolyDP()函数构建指定边数的。其完整定义如下:
def approxPolyDP(curve, epsilon, closed, approxCurve=None):
curve:轮廓
epsilon:精度,原始轮廓的边界点与边界之间的最大距离
closed:布尔类型。为True时,表示是封闭的。为False时,biao表示毕竟多边形是不封闭的。
approxCurve为该函数的返回值,是的点集。。
下面,我们来实现各类的绘制,代码如下:
import cv2
img = cv2.imread("24.jpg")
list=[0.1,0.09,0.055,0.05,0.02]
cv2.imshow("img", img)
# 转换为灰度图像
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
ret, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
contours, hierarchy = cv2.findContours(binary, cv2.RETR_LIST, cv2.CHAIN_APPROX_SIMPLE)
for i, val in enumerate(list):
epsilon = val * cv2.arcLength(contours[0], True)
approx = cv2.approxPolyDP(contours[0], epsilon, True)
cv2.drawContours(img, [approx], 0, (0, 255, 0), 2)
cv2.imshow("img"+str(i), img)
cv2.waitKey()
cv2.destroyAllWindows()
运行之后,效果如下:

cv2.approxPolyDP()函数采用的是Douglas-Peucker算法,该算法的原理是首先从轮廓中找到距离最远的两个点,并将两个点相连。接下来,在轮廓上找到一个离当前直线最远的点,并将该点与原有直线连成一个封闭的多边形,此时得到一个。以此类推四边形,五边形,六边形等。当前多边形的距离都小于函数cv2.approxPolyDP()的参数epsilon的值时,就停止迭代。